
這次推薦的是另一系列非常經典的製作機器人入門教學文章 。一共分成十個單元,每單元介紹一個主題 。我們將陸陸續續和各位分享!
課程目錄
目錄連結: 第1課 - 入門 第2課 - 選擇機器人平台 第3課 - 了解制動器 第4課 - 了解微控制器 第5課 - 選擇馬達控制器 第6課 - 控制你的機器人 第7課 - 使用感知器 第8課 - 獲得正確的工具 第9課 - 機器人組裝 第10課 - 機器人控制程式編寫
第3課 – 了解致動器
我們已經由第一課了解了甚麼是機器人,第二課決定了要製做甚麼機器人,接下來我們將一同來選擇能讓機器人動起來的致動器。
什麼是致動器?
“致動器”可以被定義為將能量(一般而言機器人中大多使用電能)轉換成物理運動的裝置。絕大多數致動器產生旋轉或線性運動。例如,“DC馬達”就是一種致動器。
為機器人選擇正確的致動器除了需要了解有那些致動器可用外,還需一些想像力,以及一些數學和物理的知識。
旋轉致動器
正如其名稱,這種類型的致動器將電能轉化為旋轉運動。有兩個主要的機械參數將它們彼此區分:(1)扭矩,它們在給定距離(通常以N·m或Oz·in表示)中能夠產生的力,和(2)每分鐘轉數,或rpm)。
交流(AC)馬達
交流電很少用於移動機器人,它們中的大多數都使用來自電池的直流電(DC)供電。此外,由於其他的電子零件都使用直流電,因此致動器也使用相同類型的電源是比較方便的。交流馬達主要應用於需要非常高扭矩的工業環境,或者需要直接將馬達連接到電源/牆上插座的情況。

直流(DC)馬達
直流馬達有各種形狀和尺寸,常見的大部分是圓柱形。它們具有輸出軸,其通常在5000至10000rpm的範圍內以高速旋轉。雖然直流馬達一般轉動速度非常快,不過通常不是很有力(低扭矩)。可以添加齒輪來降低速度和增加扭矩。
要將馬達安裝到機器人中,需要將馬達本體固定到機器人的框架上。馬達通常具有安裝孔,安裝孔通常位於電機的表面上,因此它們可以垂直於表面安裝。 直流馬達可順時針(CW)或逆時針旋轉(CCW)操作。轉動軸的角度變化可以使用編碼器或電位計來量測。

減速直流(DC)馬達
直流齒輪馬達結合了直流馬達與用來降低轉速並提高扭矩的齒輪箱。例如,如果一個直流馬達以10000rpm旋轉,並且產生0.001 N‧m的力矩,加入256:1(“256至1”)的減速齒輪後, 速度將降低256倍(10000rpm / 256 = 39rpm),並且將扭矩增加為256倍(0.001×256 = 0.256N·m)。最常見的類型傳動裝置的是“ SPUR ”(最常見的),“ 行星 ”(更複雜但在有限的空間內提供更高的齒輪減速比, 及更高的效率)和“ WORM”(單?即可提供非常高的齒輪比,並且還能防止軸心在馬達未通電實產生轉動)。就像直流馬達,直流減速馬達也可以產生順時針旋轉和逆時針旋轉。如果需要知道馬達的轉數,可以在軸上增加“編碼器”。

R / C伺服馬達
R / C(或玩家)伺服馬達是一種可以將軸旋轉到特定的角度位置的致動器,過去常被應用在較高檔的遙控移動載具用於轉向或控制飛行平面。現在它們在各種領域中被應用,這種玩家用伺服馬達的價格已經有顯著下降,並且選擇(不同的尺寸,技術和強度)增加很多。
大多數伺服機的共同點是僅旋轉大約180度。一個 玩家伺服馬達實際上包括一個直流馬達,齒輪組,電子零件和旋轉電位器(測量角度)。電子零件和 電位器同步運作來讓馬達工作,並在指定的角度將輸出軸停止下來。這些伺服機通常具有三條線路:接地,電壓輸入和控制脈衝。控制脈衝通常由伺服馬達控制裝置所產生。“ 機器人用伺服機 ”是一種新型的伺服機,它同時提供連續旋轉和位置反饋。所有伺服都可以順時針和逆時針旋轉。

工業伺服馬達
工業伺服馬達的控制不同於玩家使用的伺服馬達,一般被應用在非常大的機器設備。工業伺服馬達通常由大AC(有時是三相)馬達,減速器和編碼器所組成,它可以提供角度和速度的反饋。因為它們的重量,尺寸,成本和復雜性,使得這些馬達很少用於機器人。你可能會發現工業伺服器馬達被應用在的工業級的機器人手臂或大型的機器人載具中。

步進馬達
步進電馬達正是顧名思義; 它以指定的“步長”(實際上,特定角度)旋轉。軸隨每一步(步長)旋轉的角度數基於若干因素而變化。大多數步進電機不包括齒輪,因此就像直流電機,扭矩通常很低。配置正確,步進器可以順時針和逆時針旋轉,並可以移動到所需的角位置。有單極和雙極步進馬達類型。步進馬達的一個顯著缺點是,如果馬達未通電,則很難確定馬達的起始角度。
添加齒輪到步進馬達具有和添加齒輪到直流馬達一樣的效果:它增加了扭矩和降低輸出角速度。由於速度通過齒輪比而降低,所以步長也以同樣的因子減小。如果非減速步進電機的步進尺寸為1.2度,並且添加了55:1的減速比,則新步長將為1.2 / 55 = 0.0218度。

線性致動器
一個線性致動器可以產生直線運動(沿一條直線運動),並有三個主要的機械特性:桿可以移動的最小和最大的距離“也稱為”行程“,以毫米或英寸),力(以Kg或磅)和它們的速度(m / s或inch / s)。
直流線性致動器
直流線性致動器通常將導螺桿裝置於直流馬達上。當馬達轉動時,導螺桿也會跟著旋轉。導螺桿上的移動棒被迫靠近或遠離馬達,基本上將旋轉運動轉化為線性運動。有些直流線性致動器整合了線性電位器來提供的線性位置的反饋。為了阻止致動器自身損壞,許多製造商在其任一端放置限位開關,當按壓時切斷致動器的電力。直流線性致動器具有各種尺寸,衝程和力。

電磁閥
電磁閥螺線管由纏繞在可移動芯上的線圈組成。當線圈通電時,芯被推離磁場並產生單一方向的運動。為了可以在兩個方向上提供運動將需要數個線圈或一些機械裝置。螺線管的行程通常很小,但它們的速度非常快。強度主要取決於線圈尺寸和通過它的電流。這種類型的致動器通常用於閥或閉鎖系統中,並且通常沒有位置反饋(其完全縮回或完全伸出)。

肌肉線
肌肉線是一種特殊類型的金屬絲的當電流穿過它時會收縮。一旦電流消失(並且線冷卻下來),將返回到其原始長度。這種類型的致動器力量不是很大,很快速或能提供長的行程。然而,當需要在非常小的部件或非常狹窄的空間中使用時,這是非常方便的零件。

氣動和液壓
氣動和液壓致動器分別使用空氣或液體(例如水或油)以產生線性運動。這些類型的致動器可以具有非常長的行程,大的力量和高的速度。它們需要使用流體壓縮機來操作它,這使得它們比常規使用電能的致動器更難操作。由於它們具有高的力速度和通常較大的尺寸,它們主要被應用於工業環境中。

選擇致動器
為了幫助您選擇執行特定任務的致動器,我們整理了下面幾個問題來協助您做出正確的選擇。
特別要注意的是,總是有新的和創新的技術被帶到市場,沒有什麼是一直不變的。另外還要注意,相同的致動器可以在不同的任務中做出非常不同的表現。例如,加上機構零件後,產生線性運動的致動器可以用來轉動物體,反之亦然(如在汽車的雨刷)。
(1) 致動器是否用來移動帶輪子的機器人?
驅動馬達必須移動整個機器人的重量,並且很可能需要減速。大多數機器人使用“滑動轉向”,而汽車或卡車傾向於使用齒條和小齒輪來轉向。如果您選擇滑動轉向, 直流減速馬達是理想的選擇使用於機器人的車輪或履帶,因為它們可提供連續旋轉,並且可以採用光學編碼的技術來反饋位置的選項,是非常容易編程和使用。如果您想使用齒輪齒條,您將需要一個驅動馬達(也建議使用直流齒輪)和一個馬達來控制前輪轉向。對於滾動,由於所需的旋轉被限製到特定角度,因此R / C伺服將是合理的選擇。

(2) 馬達是否用於提升或轉動重物?
抬起重物需要比在平坦表面上移動重物更大的功率。速度必須為了扭矩被犧牲並且最好使用具有高齒輪比的齒輪箱和強大的直流馬達或直流線性致動器。考慮使用防止在斷電情況下不會讓重物墜落的系統(使用蝸輪或夾具)。

(3) 運動範圍是否限制在180度?
如果範圍被限制為180度而且所需要的扭矩不大,一個R /C伺服馬達是理想的。伺服馬達提供各種不同的扭矩和尺寸,並提供角位置反饋(大多使用電位計,部分使用光電編碼器)。 R / C伺服機被用於越來越多的創造走路的小機器人。
 (4) 角度需要很精確嗎?
(4) 角度需要很精確嗎?
步進馬達和齒輪步進馬達(加上一個步進電機控制器)可以提供非常精確的轉動角度。它們有時是伺服電機的首選,因為它們可以提供連續旋轉。一些高端數位伺服馬達使用光學編碼器,可以提供非常高的精度。
 (5) 運動是否需在一條直線上?
(5) 運動是否需在一條直線上?
線性致動器是最合適用來讓物體沿著直線移動。它們有各種尺寸和配置。 肌肉線應該只有當你的運動只需要很少的力量才加以考慮。對於非常快速運動,考慮氣動或電磁閥. 對於非常大的力量,考慮直流線性驅動器(高達約500磅),然後液壓。

工具
為了計算我們的設計所需的力量(或扭矩)和速度,許多(相當複雜的)計算將被需要包含了製作機械的物理學。為了簡化設計過程,我們整理了幾個可以幫助你的工具。
- 直流驅動馬達選擇器(車輪或履帶機器人適用)。亦可以參考 驅動馬達選型指南 了解更多詳情。
- 機器人腿扭矩教程
- 機器手臂扭矩計算器
實際示例
在第1課我們目標對移動機器人有更完整的了解,同時保持預算約$ 200到$300之間。在第2課,我們決定我們將製作一個小坦克(使用履帶),可以在桌子上操作。
首先,讓我們利用回答上述五個問題來決定所需的執行器類型:
- 致動器是否用來移動帶輪子的機器人?
是。直流齒輪馬達是推薦的致動器類型,滑動轉向適用於坦克,這意味著每邊的履帶都需要它自己的馬達。 - 馬達是否用於提升或轉動重物?
不,桌上型小車不會很重。 - 運動範圍是否限制在180度?
不,車輪需要連續地轉動。 - 角度需要很精確嗎?
不,我們的機器人不需要位置反饋。 - 運動是否需在一條直線上?
不,因為我們想讓機器人能轉彎並可以往各個方向移動。
由於讓輪子轉動需要旋轉運動,因此我們可以直接忽略所有線性執行器,並選擇直流齒輪馬達。下一個合乎邏輯的問題是:“哪一個?” 網上一查表明,有沒有太多的軌道系統用於小型機器人,這會限制我們可以考慮哪些電機。
當前可用的履帶系統

2吋和3吋這個範圍的寬度,Lynxmotion履帶更適合應用在中型機器人,所以我們會忽略它們。價格確實落在預算內。
Vex坦克履帶套件也是一個很不錯的選擇,但它會限制我們非得選擇某一個特定的馬達。
在田宮履帶和輪子套件,絕對是一個不錯的選擇,而且不會讓我們有過多的選擇也會限制我們的選擇專注於田宮電機和變速箱。這也在預算範圍內。

有幾種Johnny機器人履帶套件,一個用於Hitec連續旋轉伺服機(其基本上是一個裝在伺服機內的齒輪馬達)另一個為Futaba連續旋轉伺服機,一個用於 田宮馬達和另一個用於Pololu或Solarbotics馬達。這絕對是一個很好的選擇,也在我們的預算之內。主要是因為美學和馬達兼容性的原因,我們將堅持這種選擇。
總是優很多機會可以改裝一些玩具像是將R / C坦克改裝成機器人。這個選項也會給我們兼容的馬達,但是,目標是設計我們自己的機器人,而不是改裝另一個產品。
計算馬達要求
下一步是填寫 直流驅動馬達選擇工具,採用近似值。
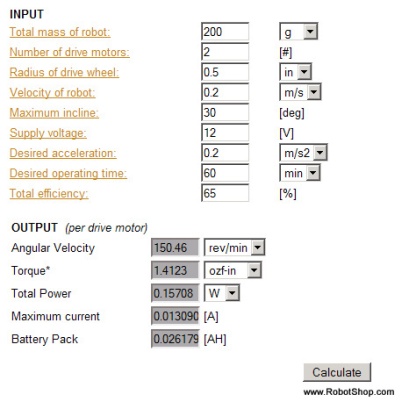
數據詳細信息
- 機器人總質量:200 g已包括所有零件:馬達,框架,電池等等。
- 驅動電機數量:滑動轉向需要兩個電機。
- 驅動輪的半徑:從0.5吋到大約1吋是適合桌面機器人的尺寸。
- 機器人速度:0.2米/秒將是一個很合適桌面機器人的速度。
- 最大坡度:攀登一些書籍會很酷,讓我們選擇30度。
- 電源電壓:目前不確定,所以我們選擇預設12 V
- 所需的加速度:不確定,所以選擇預設直0.2米/秒2
- 所需工作時間:30分鐘適合適的時間。
- 總效率:不確定,所以我們選擇預設值65%
- 使用0.5吋作為車輪半徑時轉速為150rpm @ 1.4oz-in。使用1吋時轉速是75rpm @ 2.8 oz-in。
選擇電機
因此,我們正在尋找的馬達轉速大約是150 rpm,並提供大約1.4123 oz-in的扭矩。我們可以使用直流馬達比較表,以便找到合適的電機。
有很多可以跟Johnny機器人履帶工具包搭配的馬達:
Solarbotics GM8和 GM9分別配備了70rpm@43oz-in和66rpm@43 OZ-in 兩者價格都是5.46美元。
所有的 田宮變速器和電機組合的價格約是$ 11以上,提供多種扭矩和速度可選擇。
Hitec連續旋轉伺服機和Futaba連續旋轉伺服機售價分別為$ 17和$ 14
最後,我們選擇使用的一對Solarbotics GM9為了直型滑動轉向,主要是因為它們的成本低。
特別要注意,雖然計算器指定我們需要大約150rpm,我們選擇電機無論如何,知道它移動的速度大約只有原始值(目標值)的一半。該馬達產生的扭矩明顯大於我們所需要的扭矩,這意味著它可以承載額外的重量或攀爬步進角度。

原著: Coleman Benson/譯者: 阿里哥
文章出處: RobotShop 目錄連結: 第1課 - 入門 第2課 - 選擇機器人平台 第3課 - 了解制動器 第4課 - 了解微控制器 第5課 - 選擇馬達控制器 第6課 - 控制你的機器人 第7課 - 使用感知器 第8課 - 獲得正確的工具 第9課 - 機器人組裝 第10課 - 機器人控制程式編寫
